这篇文档主要介绍如何在WiringPi以及WiringPi-Python上使用软件PWM控制舵机。
舵机控制原理
舵机的基准信号都是周期为20ms,宽度为1.5ms。对应舵机的中间位置。
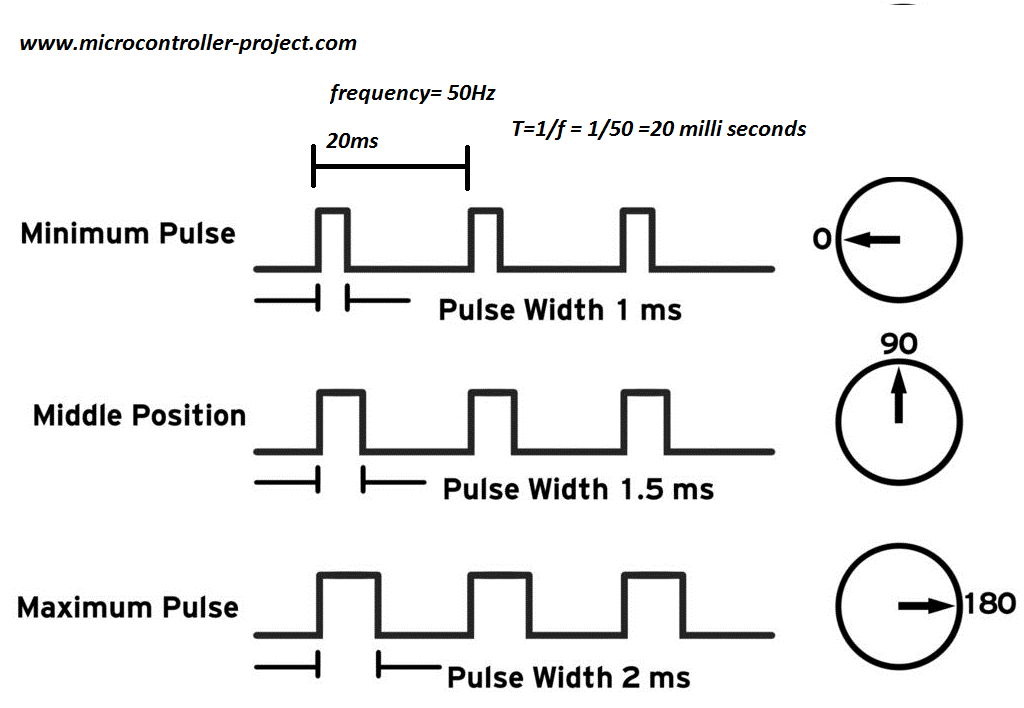
不同的宽度对应着舵机的不同角度,脉冲宽度对应的范围是0.5ms到2.5ms。
1
2
3
4
5
| 0.5ms -- 0度
1ms -- 45度
1.5ms -- 90度
2ms -- 135度
2.5ms -- 180度
|
360度模拟舵机工作原理与舵机相同。
1
2
3
| 0.5ms -- 逆时针最大转速
1.5ms -- 暂停转动
2.5ms -- 顺时钟最大转速
|
源码编译以及演示
说明
- 通过
gpio readall可查看可用的引脚:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
| $ gpio readall
+------+-----+----------+------+---+----+-- Model Khadas VIM3/3L --+----+---+------+----------+-----+------+
| GPIO | wPi | Name | Mode | V | DS | PU/PD | Physical | PU/PD | DS | V | Mode | Name | wPi | GPIO |
+------+-----+----------+------+---+----+-------+----++----+-------+----+---+------+----------+-----+------+
| | | 5V | | | | | 1 || 21 | | | | | GND | | |
| | | 5V | | | | | 2 || 22 | P/U | | 1 | IN | PIN.A15 | 6 | 475 |
| | | USB_DM | | | | | 3 || 23 | P/U | | 1 | IN | PIN.A14 | 7 | 474 |
| | | USB_DP | | | | | 4 || 24 | | | | | GND | | |
| | | GND | | | | | 5 || 25 | P/U | | 1 | ALT0 | PIN.AO2 | 8 | 498 |
| | | MCU3V3 | | | | | 6 || 26 | P/U | | 1 | ALT0 | PIN.AO3 | 9 | 499 |
| | | MCUNRST | | | | | 7 || 27 | | | | | 3V3 | | |
| | | MCUSWIM | | | | | 8 || 28 | | | | | GND | | |
| | | GND | | | | | 9 || 29 | P/D | | 0 | IN | PIN.A1 | 10 | 461 |
| | 18 | ADC0 | | | | | 10 || 30 | P/D | | 0 | IN | PIN.A0 | 11 | 460 |
| | | 1V8 | | | | | 11 || 31 | P/D | | 0 | IN | PIN.A3 | 12 | 463 |
| | 19 | ADC1 | | | | | 12 || 32 | P/D | | 0 | IN | PIN.A2 | 13 | 462 |
| 506 | 1 | PIN.AO10 | ALT3 | 0 | | P/U | 13 || 33 | P/D | | 0 | IN | PIN.A4 | 14 | 464 |
| | | GND3 | | | | | 14 || 34 | | | | | GND | | |
| 433 | 2 | PIN.H6 | IN | 0 | | P/D | 15 || 35 | P/D | | 0 | ALT3 | PWM-F | 15 | 432 |
| 434 | 3 | PIN.H7 | IN | 0 | | P/D | 16 || 36 | | | | | RTC | | |
| | | GND | | | | | 17 || 37 | P/D | | 0 | OUT | PIN.H4 | 16 | 431 |
| 497 | 4 | PIN.AO1 | ALT0 | 1 | | P/U | 18 || 38 | | | | | MCU-FA1 | | |
| 496 | 5 | PIN.AO0 | ALT0 | 1 | | P/U | 19 || 39 | P/D | | 0 | IN | PIN.Z15 | 17 | 426 |
| | | 3V3 | | | | | 20 || 40 | | | | | GND | | |
+------+-----+----------+------+---+----+-------+----++----+-------+----+---+------+----------+-----+------+
|
引脚配置成普通IO输出。
通过softPwmCreate()和softPwmWrite()函数模拟PWM并控制。
WiringPi源码以及编译
- 舵机在1800度、90度、0度之间来回切换,切换间隔为3s切换一次,周期为9s。
- 模拟舵机在顺时针转动,暂停转动和逆时针转动来回切换,切换间隔为3s切换一次,周期为9s。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| #include <wiringPi.h>
#include <softPwm.h>
int Pin = 16;
int main(){
wiringPiSetup();
pinMode(Pin, OUTPUT);
softPwmCreate(Pin, 0, 200);
while(1){
softPwmWrite(Pin, 25);
delay(3000);
softPwmWrite(Pin, 15);
delay(3000);
softPwmWrite(Pin, 5);
delay(3000);
}
return 0;
}
|
- 编译命令:
1
| $ gcc -o SoftPwm SoftPwm.c -lwiringPi -lpthread -lrt -lm -lcrypt
|
WiringPi-Python源码
- 舵机先后在180度、90度和0度之间切换,时间间隔为3s。
- 模拟舵机在顺时针转动,暂停转动和逆时针转动之间切换,时间间隔为3s。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| import wiringpi as GPIO
PWM_PIN = 16
PWM_OUTPUT = 1
GPIO.wiringPiSetup()
GPIO.pinMode(PWM_PIN, PWM_OUTPUT)
GPIO.softPwmCreate(PWM_PIN, 0, 200)
GPIO.softPwmWrite(PWM_PIN, 25)
GPIO.delay(3000)
GPIO.softPwmWrite(PWM_PIN, 15)
GPIO.delay(3000)
GPIO.softPwmWrite(PWM_PIN, 5)
GPIO.delay(3000)
|